Sai Ramana KiranI am a Senior Algorithms Engineer at Quidient , developing algorithms for 3D reconstruction at the intersection of Computer Graphics, Computer Vision, and Deep Learning. Prior to this I worked on 3D computer vision using edge devices for tiny aerial robots at PeAR Lab, WPI along with my master's advisor Prof Nitin Sanket. From 2018 to 2022, I worked at Quantitative Brokers as a senior C++ software developer. I designed latency sensitive trading systems and algorithms for fast algorithmic execution. I got my BS/MS in Aerospace Engineering from IIT Madras, where I worked in Prof Ranjith Mohan's lab on Aerial and Ground Robot Collaborative Navigation systems I learn by teaching and as part of that effort I jot down my thoughts on concepts I learn. You can find this in my obsidian second brain.
CV
/
Email
/
GitHub
/
Google Scholar
/
LinkedIn
/
|

|

|

|

|

|

|

|
|
Senior Algorithms Engineer - CV/CG/ML Quidient May 2024 - Present |
Computer Vision and Deep Learning Intern Torc Robotics Aug 2023 - Dec 2023 |
Perception and Localization Intern Nokia Bell Labs Summer 2023 Spring 2024 |
M.Sc Robotics WPI 2022-2024 |
Senior C++ Developer Quantitative Brokers Jul 2018 - July 2022 |
B.Tech/M.Tech Aerospace Engineering IITM 2013-2018 |
ResearchI'm interested in math, computer vision, machine learning, optimization, graphics and their applications to robotics. |
|
EdgeFlowNet: 100FPS@1W Optical Flow For Tiny Mobile RobotsSai Ramana Kiran, Rishabh Singh, Manoj Velmurgan, Nitin Sanket We present an approach to achieve 100FPS optical flow inference speeds and demonstrate on real world robot autonomy experiments. Our work has been accepted to IEEE Robotics and Automation Letters (RA-L) and will be presented at ICRA 2025. |
|
Aerial-Ground Robotic system for Terrain estimation and NavigationSai Ramana Kiran, Ashutosh Kumar, Ranjith Mohan ICC, 2019 We show autonomous aerial vehicle and ground vehicle collaborate while performing task of unknown rough terrain estimation and navigation. |
ProjectsThese include coursework, side projects and unpublished research work. |
|
Enhancing Multi view structured Bird’s-Eye-View Traffic Scene Understanding from Onboard Imagesslides / project page Enhanced the original STSU’s transformer architecture to use multi-view onboard images using enhanced positional encoding to construct better lane lines |
|
Stereo Visual Inertial Odometryproject page Implemented Multi-State Constraint Kalman Filter based Visual Inertial Odometry |
|
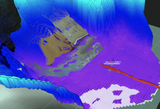
Point Cloud Semantic Mappingproject page A pipeline to combine the data from LiDAR and Camera to obtain semantic painted point cloud. |
|
Neural Radience Fields (NeRF)project page Implemented a full pipeline of NeRF |
|
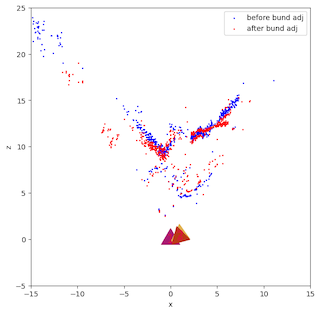
Structure from Motion (SfM)project page Simultaneously reconstructed 3D scene (Mapping) and extracted camera pose (Localization) from given camera correspondences using (Non)Linear triangulation, (Non)Linear PnP and Bundle Adjustment (BA) pipeline |
|
AutoCalib: Zhang's Calibration moduleproject page Implemented Zhang’s camera calibration by nonlinear optimization of intrinsics and extrinsics |

|
Face Swapproject page Faceswap pipeline using Delaunay triangulation and Thin plate splines based warping and poisson blending in a video |
|
AutoPano: Stitching assorted imagesproject page Created a panorama by stitching images using homography estimated from traditional (ANMS, RANSAC feature points) and Deep learning (Supervised and Unsupervised HomographyNet) methods |
|
Design and source code from Jon Barron's website fork of Leonid Keselman |